一、主要部件
應用金屬彈性力學的諧波驅動僅由三個基本零部件(波發生器、柔輪和剛輪)構成(因形狀不同,有的是由四種基本元件構成的,但傳動原理不變)。產生這一高精度傳動的諧波驅動獨樹一幟的機制原理可從其嚙合中窺見一斑。
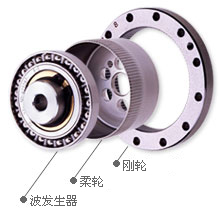
1、波發生器
橢圓形凸輪外周嵌有薄壁滾珠軸承的部分。軸承內輪固定在凸輪上,外輪通過滾珠實現彈性變形。通常安裝在輸入軸上。
2、柔輪
具有薄壁杯型的金屬彈性體部件。開口部外周刻有齒輪。柔輪底部(杯狀物的底部)稱為膜片,通常安裝在輸出軸上。
3、剛輪
剛體環狀部件。內周刻有齒輪,比柔輪多兩個輪齒。通常固定在外殼上。
二、工作原理
1、波發生器使柔輪產生彈性變形而呈橢圓狀。為此,橢圓的長軸部分與剛輪完全嚙合,而短軸部分兩輪輪齒處于完全脫開狀態。
2、使剛輪固定,波發生器順時針旋轉,柔輪產生彈性變形,與剛輪輪齒嚙合的部位順次移動。
3、波發生器順時針旋轉180度,柔輪逆時針移動一個輪齒。
4、波發生器旋轉一周(360度),由于柔輪的齒數比剛輪少兩個,因此逆時針移動兩個輪齒。通常將該運動傳遞作為
減速比高
單級同軸可獲得1/30~1/320的高減速比。結構、構造簡單,卻能實現高減速比裝置。
齒隙小(空轉)
諧波驅動不同于普通的齒輪嚙合,齒隙極小,該特長對于控制器領域而言是不可缺少的要素。
精度高
多齒同時嚙合,并且有兩個180度對稱的齒輪嚙合,因此齒輪齒距誤差和累積齒距誤差對旋轉精度的影響較為平均,使位置精度和旋轉精度達到極高的水準。
零部件少,安裝簡便
三個基本零部件實現高減速比,而且它們都在同軸上,所以套件安裝簡便,造型簡捷。
體積小、重量輕
與以往的齒輪裝置相比,體積為1/3,重量為1/2,卻能獲得相同的轉矩容量和減速比,實現小型輕量化。
轉矩容量高
柔輪材料使用疲勞強度大的特殊鋼。與普通的傳動裝置不同,同時嚙合的齒數占總齒數的約30%,而且是面接觸,因此使得每個齒輪所承受的壓力變小,可獲得很高的轉矩容量。
效率高
輪齒嚙合部位滑動甚小,減少了摩擦產生的動力損失,因此在獲得高減速比的同時,得以維持高效率,并實現驅動馬達的小型化。
噪音小
輪齒嚙合周速低,傳遞運動力量平衡,因此運轉安靜,且振動極小。